防止健忘
参考EVO工具github链接:link1
开源室内激光场景数据:link2
总体来说,evo是用于处理、评估和比较里程计和SLAM算法的轨迹输出。支持的轨迹文件格式:
- Tum文件
- Kitti文件
- EuRoC MAV文件
- ROS1和ROS2中带有
geometry_msgs/PoseStamped, geometry_msgs/TransformStamped, geometry_msgs/PoseWithCovarianceStamped 或者 nav_msgs/Odometry 话题或 TF messages的bag文件格式
命令行接口主要从两类分:
-
衡量标准
evo_ape:绝对位姿误差evo_rpe:相对位姿误差
-
工具
evo_traj:用于分析、绘制或导出一条或多条轨迹的工具evo_res:用于比较来自evo_ape或evo_rpe的一个或多个结果文件的工具evo_fig:用于重新打开序列化图的工具(使用 --serialize_plot 保存)evo_config:用于全局设置和配置文件操作的工具
基础用法命令行示例:
evo_traj kitti KITTI_OO_gt.txt -p
//绘制轨迹 轨迹的文件格式为kitti evo_traj [轨迹格式] [轨迹记录文本] -p为显示图表结果
evo_traj kitti KITTI_OO_gt.txt -p --plot_mode=xz
//绘制轨迹 轨迹的文件格式为(以xz模式显示)
evo_traj kitti KITTI_OO_ORB.txt --ref=KITTI_OO_gt.txt -p --plot_mode=xz -a
//绘制两条轨迹:参考(ground truth)轨迹,和slam轨迹,轨迹的格式为kitti(以xz模式显示) -a(对齐)
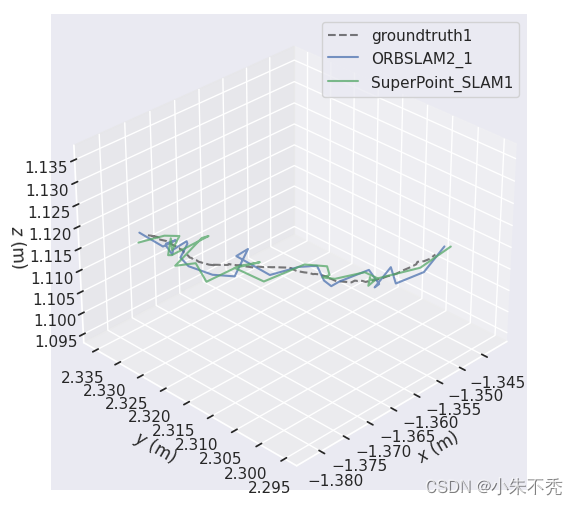
evo_traj kitti KITTI_OO_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_OO_gt.txt -p -a --plot_mode=xz
//绘制多条轨迹:参考(ground truth)轨迹,轨迹1,轨迹2……轨迹的格式为kitti(以xz模式显示)
evo_traj tum our.tum --ref karto.tum -p --plot_mode=xy --align --t_offset=61101194.17 -s
//绘制两条轨迹,--t_offset是时间戳差值 --align是对齐(也可以直接-a) -s用于相机尺度不确定性,缩放
样图:
将轨迹插入到2d 地图中
evo_traj tum karto.tum --plot --plot_mode xy --ros_map_yaml karto_odomtry.yaml

误差对比:
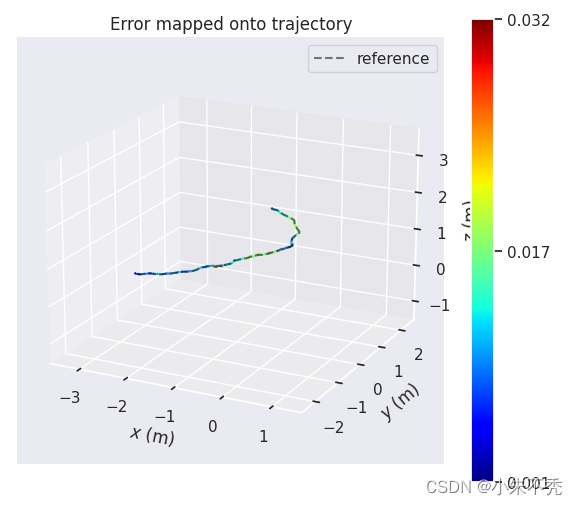
evo_ape tum groundtruth.txt ORBSLAM2.txt -va --plot --plot_mode xyz
样图:
绘制绝对轨迹误差
evo_ape tum data.tum vio_loop.txt -r trans_part -v -as -p --save_results ./1.zip
-r表示ape所基于的姿态关系
-v表示verbose mode,详细模式
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)