个人学习笔记
用于记录自己学习的成果,并且分享给大家一起看看。希望对看到这篇的朋友有所帮助。
MPU6050简介
MPU-6050是一款6轴运动处理组件,将陀螺仪和加速度计合在一起,减少了大量封装空间,还是很不错的。如果连接三轴的磁强计,那就成九轴了。MPU6050用的是IIC通信,想要了解更多的话,直接点击下方链接(省的打字搜索)
link
原始数据分析
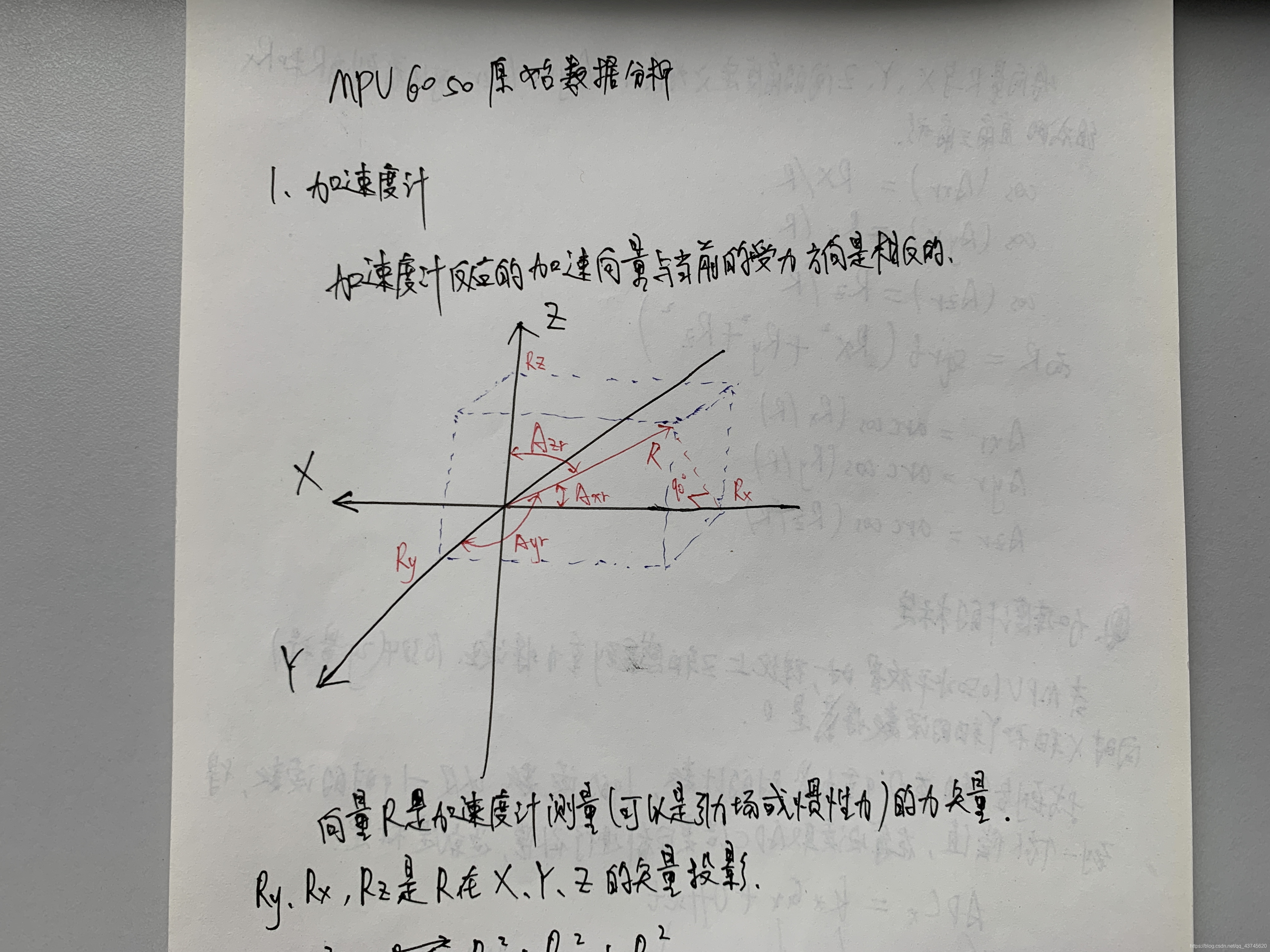
加速度计
数据手册描述如下:
Accelerometer Features
The triple-axis MEMS accelerometer in MPU-60X0 includes a wide range of features:
Digital-output triple-axis accelerometer with a programmable full scale range of ±2g, ±4g, ±8g and ±16g
Integrated 16-bit ADCs enable simultaneous sampling of accelerometers while requiring no external
multiplexer
Accelerometer normal operating current: 500µA
Low power accelerometer mode current: 10µA at 1.25Hz, 20µA at 5Hz, 60µA at 20Hz, 110µA at
40Hz
Orientation detection and signaling
Tap detection
User-programmable interrupts
High-G interrupt
User self-test
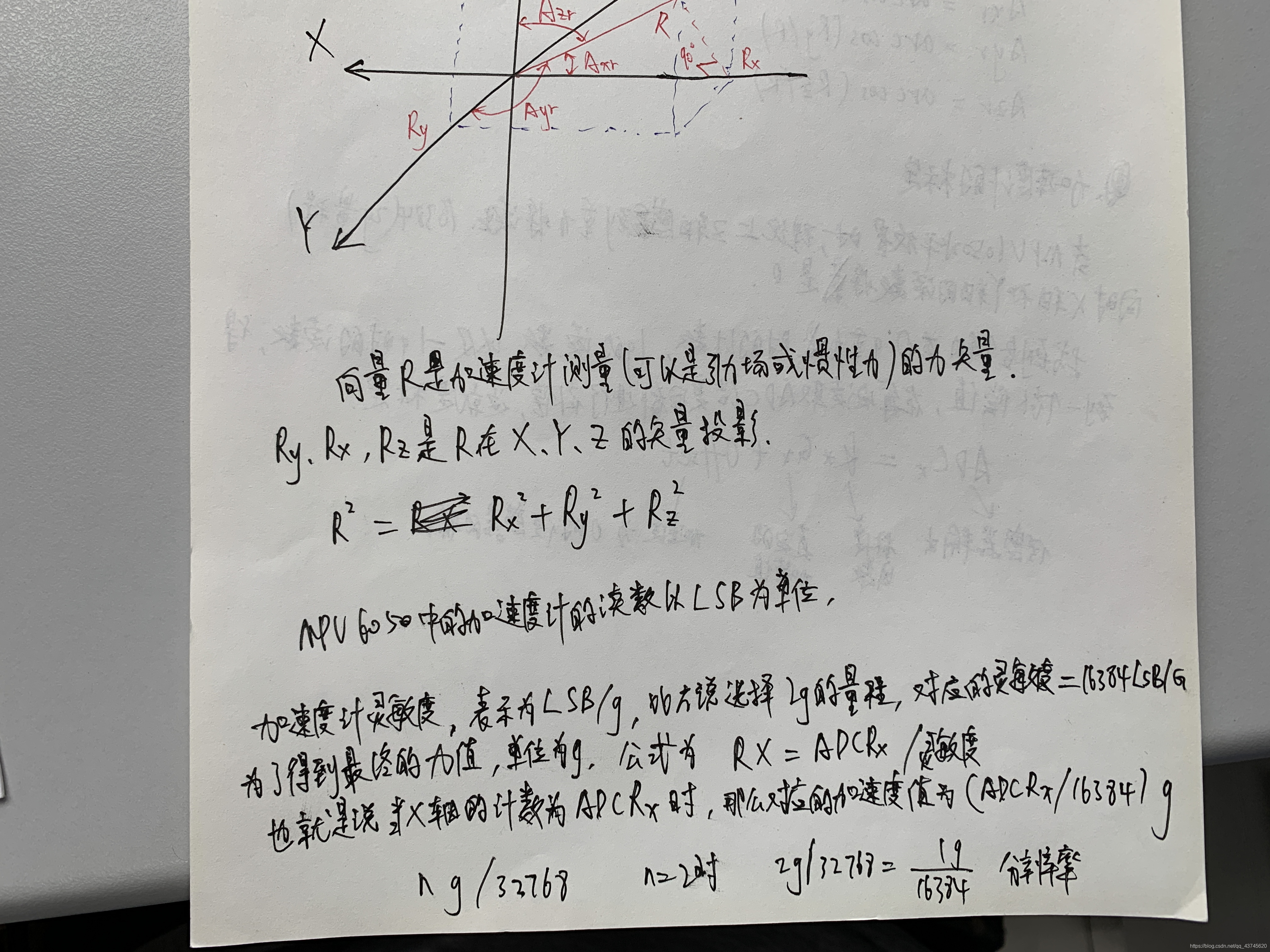
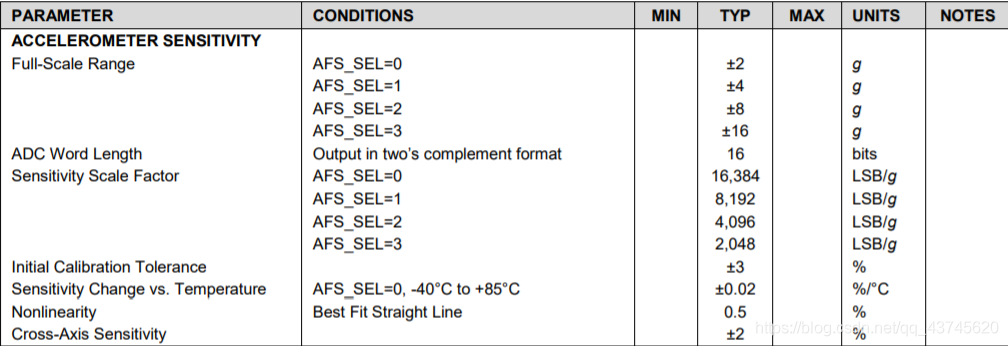
应用时处理数据我们需要知道 16-bit ADCs(读出的数据应该在-32768~32767),同时设置不同的量程 ±2g, ±4g, ±8g and ±16g
根据需求选取量程,量程选取越小,精度越高,量程较大时精度不如小量程。
设x轴加速度原始数据为ADCx,假设此时量程选取为±4g,则原始数据转换公式为 (4g * ADCx)/32768
下方笔记有兴趣可以看看,比较简略。
陀螺仪
数据手册的描述如下:
Gyroscope Features
The triple-axis MEMS gyroscope in the MPU-60X0 includes a wide range of features:
Digital-output X-, Y-, and Z-Axis angular rate sensors (gyroscopes) with a user-programmable fullscale range of ±250, ±500, ±1000, and ±2000°/sec
External sync signal connected to the FSYNC pin supports image, video and GPS synchronization
Integrated 16-bit ADCs enable simultaneous sampling of gyros
Enhanced bias and sensitivity temperature stability reduces the need for user calibration
Improved low-frequency noise performance
Digitally-programmable low-pass filter
Gyroscope operating current: 3.6mA
Standby current: 5µA
Factory calibrated sensitivity scale factor
User self-test
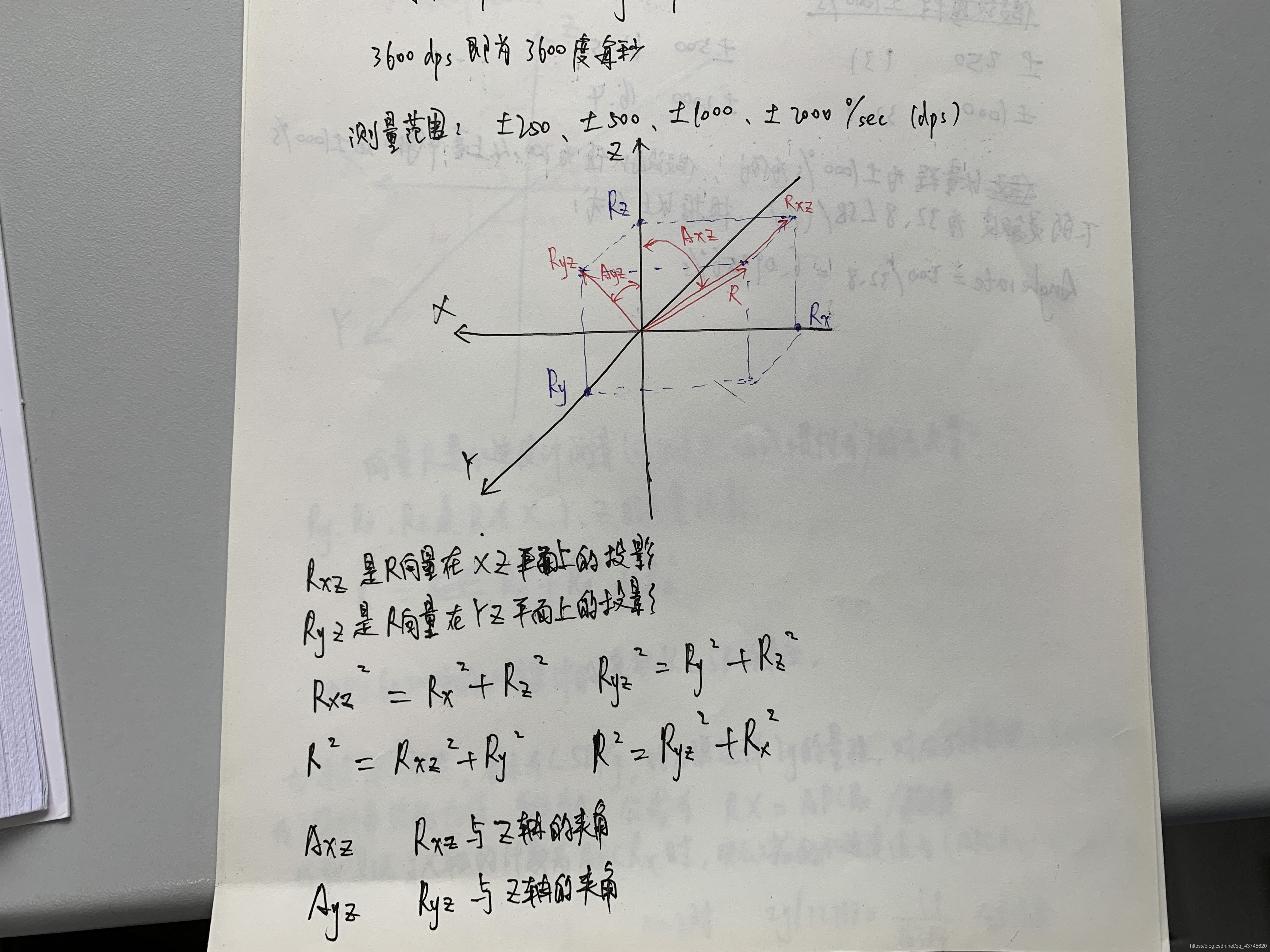
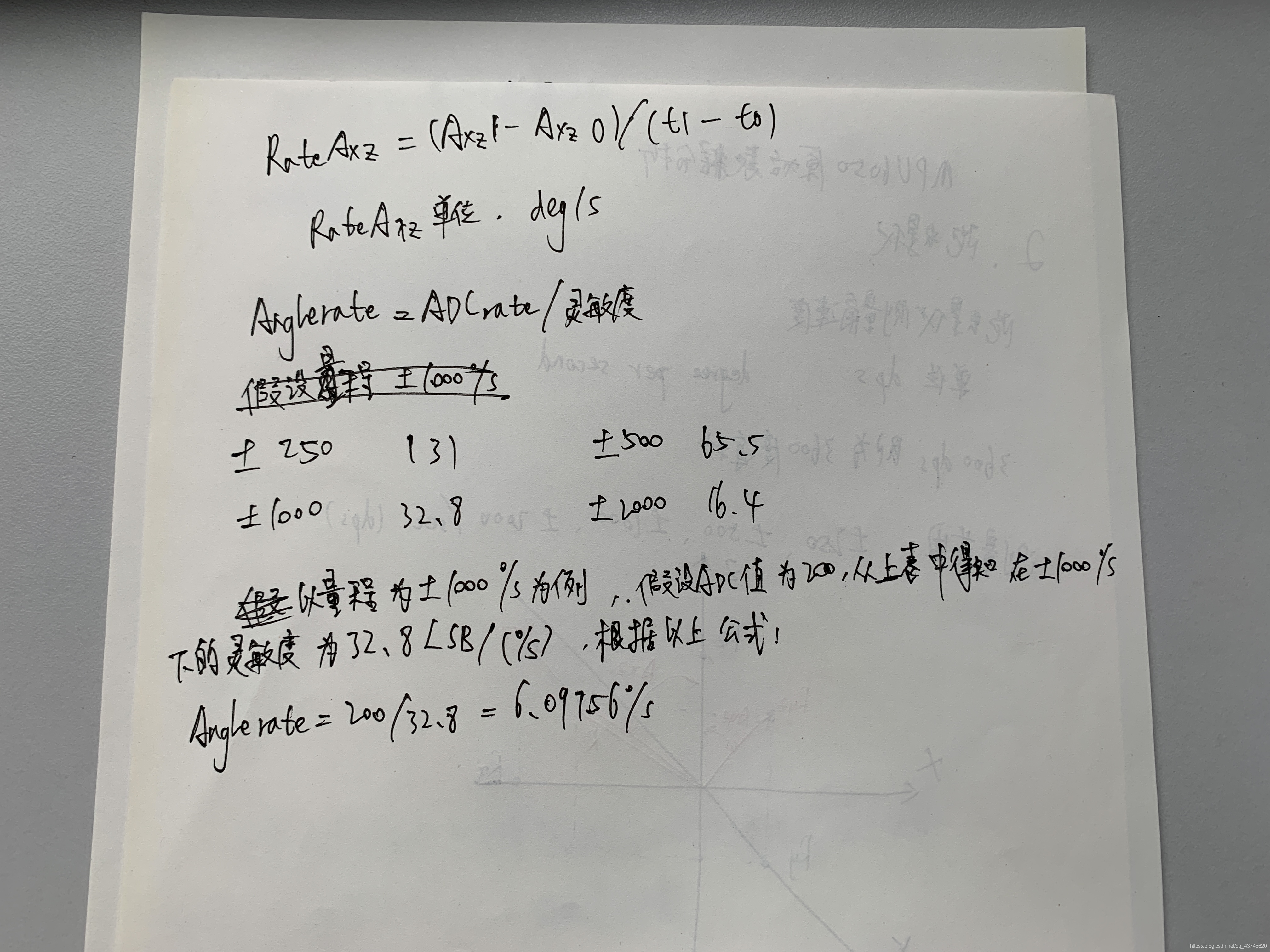
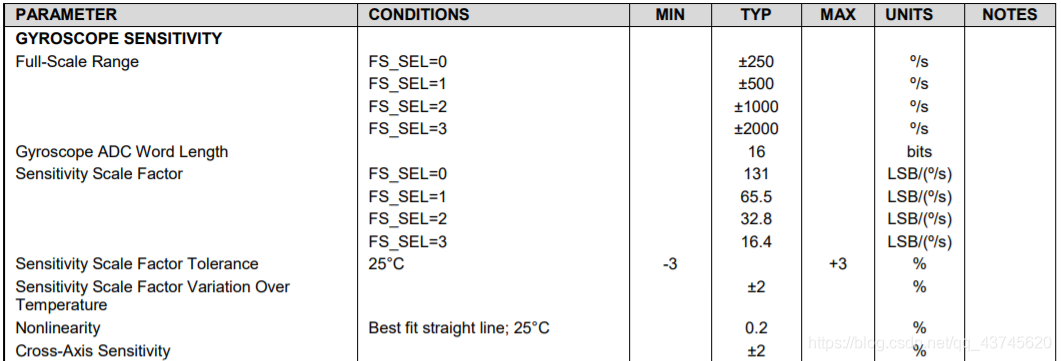
应用时处理数据我们需要知道 16-bit ADCs(读出的数据应该在-32768~32767),同时设置不同的量程 ±250, ±500, ±1000, and ±2000°/sec
陀螺仪提供的是三轴角速度
根据需求选取量程,量程选取越小,精度越高,量程较大时精度不如小量程。
设x轴角速度原始数据为ADCx,假设此时量程选取为±2000dps(degree per second),则原始数据转换公式为 (2000 * ADCx)/32768

代码
下面展示一些 MPU6050原始数据处理代码,没几行,主要是试试这个功能,第一次用CSDN写东西
代码不完整,变量、子函数什么的自己看着补吧。。。
unsigned char MPU6050_Init(void)
{
int res;
res = MPU_Read_Byte(MPU6050_ADDR,WHO_AM_I); //读取MPU6050的ID
if(res == MPU6050_ID) //器件ID正确
{
;
}
else
{
return 1;
}
res = 0;
res += MPU_Write_Byte(MPU6050_ADDR,MPU_PWR_MGMT1_REG,0X80);//复位MPU6050
delayms_mpu(100); //延时100ms
res += MPU_Write_Byte(MPU6050_ADDR,MPU_PWR_MGMT1_REG,0X00);//唤醒MPU6050
res += MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
res += MPU_Set_Accel_Fsr(1); //加速度传感器,±4g
res += MPU_Set_Rate(1000); //设置采样率1000Hz
res += MPU_Write_Byte(MPU6050_ADDR,MPU_CFG_REG,0x02); //设置数字低通滤波器 98hz
res += MPU_Write_Byte(MPU6050_ADDR,MPU_INT_EN_REG,0X00); //关闭所有中断
res += MPU_Write_Byte(MPU6050_ADDR,MPU_USER_CTRL_REG,0X00);//I2C主模式关闭
res += MPU_Write_Byte(MPU6050_ADDR,MPU_PWR_MGMT1_REG,0X01);//设置CLKSEL,PLL X轴为参考
res += MPU_Write_Byte(MPU6050_ADDR,MPU_PWR_MGMT2_REG,0X00);//加速度与陀螺仪都工作
if(res == 0) //上面寄存器都写入成功
{
;
}
else return 1;
return 0;
}
void MPU6050(void)
{
MPU_Get_Raw_data(&Accel_x,&Accel_y,&Accel_z,&Gyro_x,&Gyro_y,&Gyro_z); //得到加速度传感器数据
ax = (4*9.8*Accel_x)/32768;
ay = (4*9.8*Accel_y)/32768;
az = (4*9.8*Accel_z)/32768;
Gyro_x = (2000*Gyro_x)/32768;
Gyro_y = (2000*Gyro_y)/32768;
Gyro_z = (2000*Gyro_z)/32768;
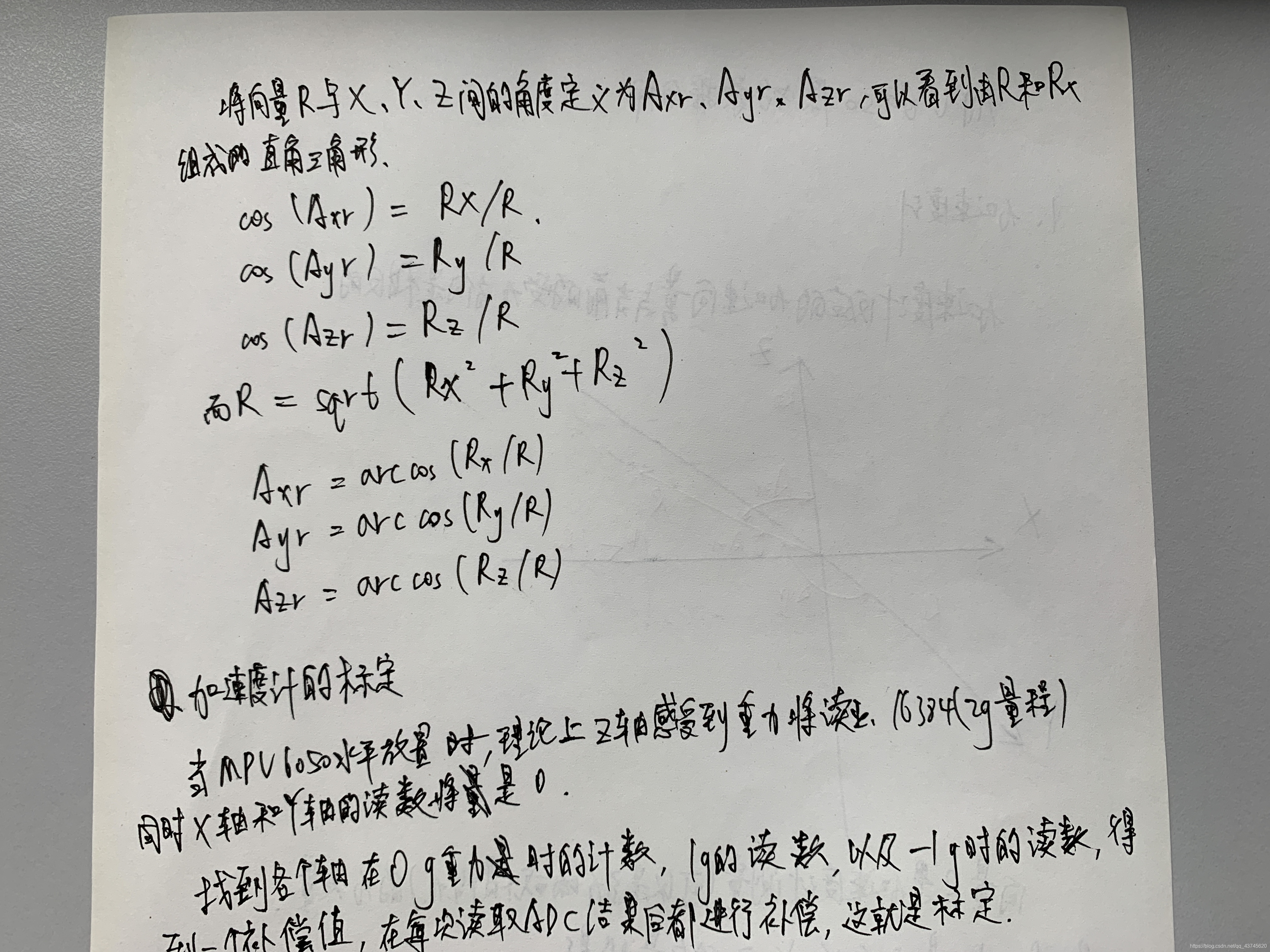
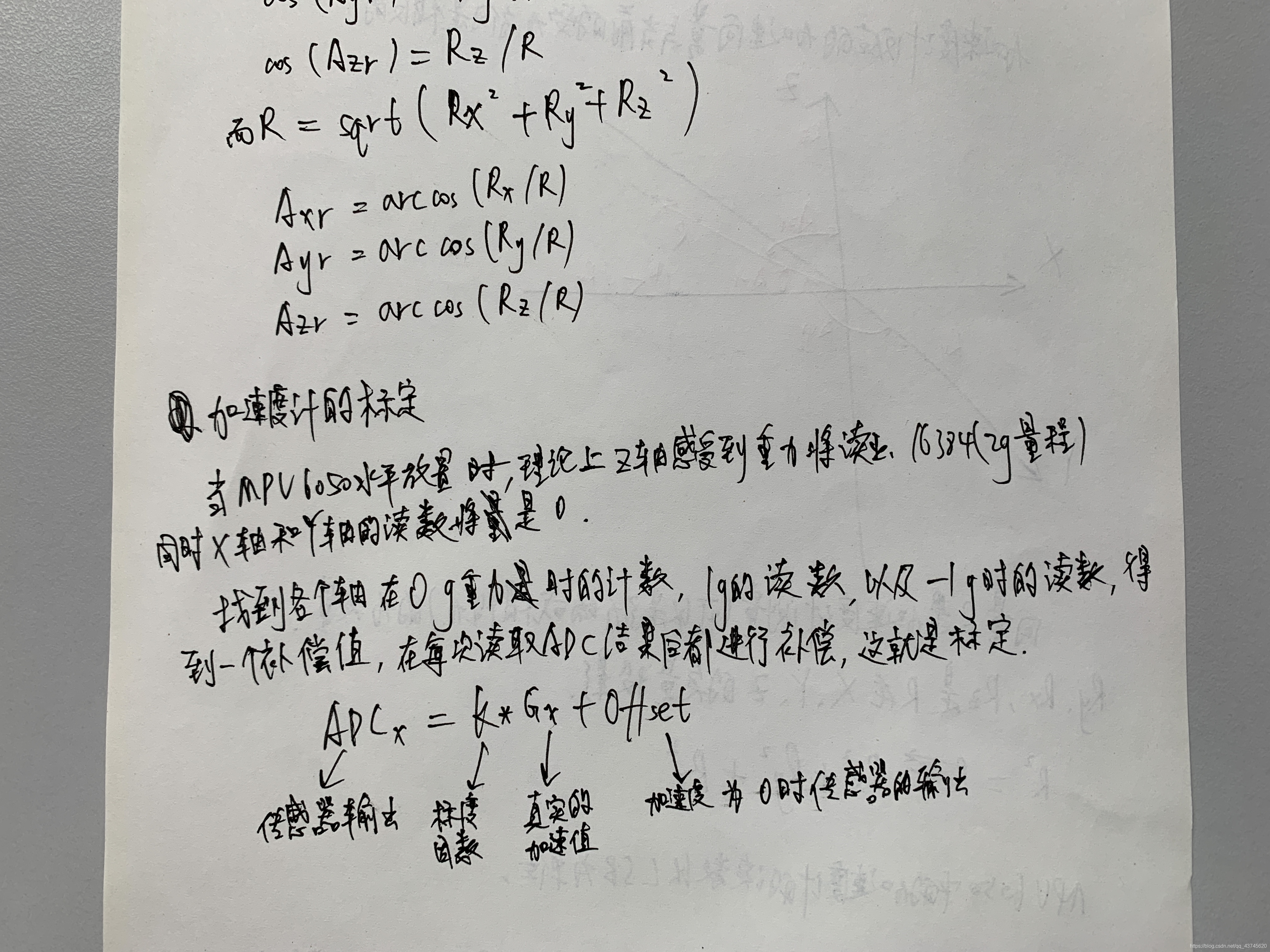
//用加速度计算三个轴和水平面坐标系之间的夹角
Angle_x_temp=(atan(ay/az))*180/3.14;
Angle_y_temp=(atan(ax/az))*180/3.14;
Kalman_Filter_X(Angle_x_temp,Gyro_x); //卡尔曼滤波计算X倾角
Kalman_Filter_Y(Angle_y_temp,Gyro_y); //卡尔曼滤波计算Y倾角
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)