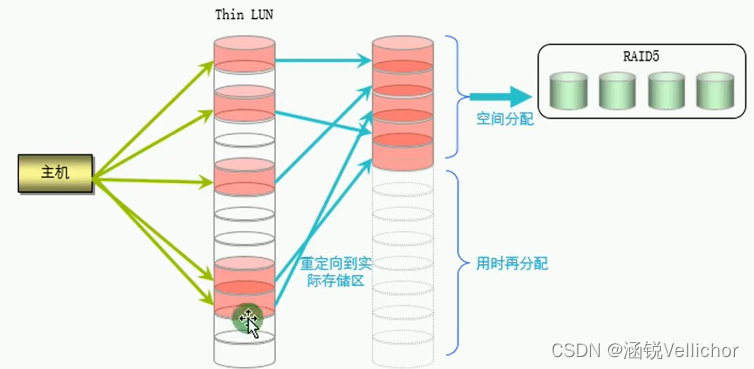
Capacity-on-write:当Thin LUN接收到主机写数据请求,首先会通过direct-on-time技术判断该写数据请求的逻辑存储区域是否已经分配了实际存储区,如果尚未分配就会触发空间分配,分配的最小粒度称为Grain, Grain大小为64k,然后将数据写入到新分配的实际存储区域中。
应用场景:
配置流程:
初始容量分配策略包括四类:自动分配、优先从高性能层分配、优先从性能层分配、优先从容量层分配。
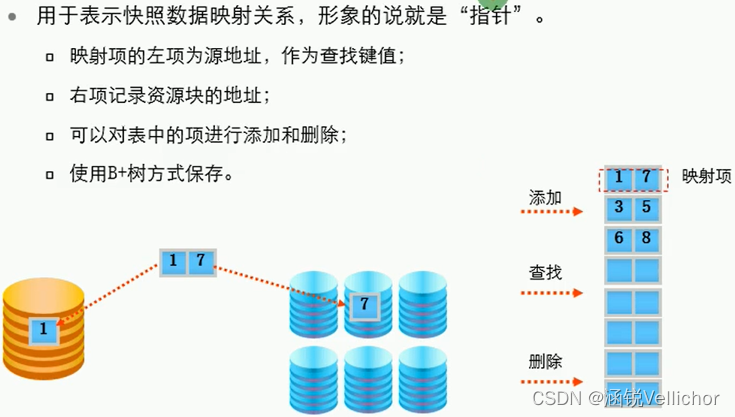
当快照被激活时(此时刻称为快照时间点),主机读写的具体操作如下:
直接使用快照进行数据备份。使用快照备份可以在以下场景中迅速恢复数据: