这个原因是Compiler Version 5编译器在Keil 5.37以后就不再默认安装了
从这个版本开始,Keil 默认安装的是 Compiler Version 6.18,如下图
图1 版本信息
解决方法:
方式1.
点击锤子图标,然后在 Target一栏选择:Version 6 (或6.18)的编译器,点击Ok退出。重新编译就可以了。
 /
/
图2 锤子(Options for Target)

图3 Target栏选择 Version 6(或者6.18)
方法2.
如果方式1解决不了,编译出现几百个报错,再尝试方法2。
安装Compiler Version 5编译器,安装好之后记得再点击锤子,切换成Version 5编译。 产生这个原因的大概率原因是用新版本的CubeMX生成了代码,而截止2023/03,Cube MX只支持生成Compiler Version5的Keil代码,不支持Version6,所以需要安装Version5然后用5编译,如图4。
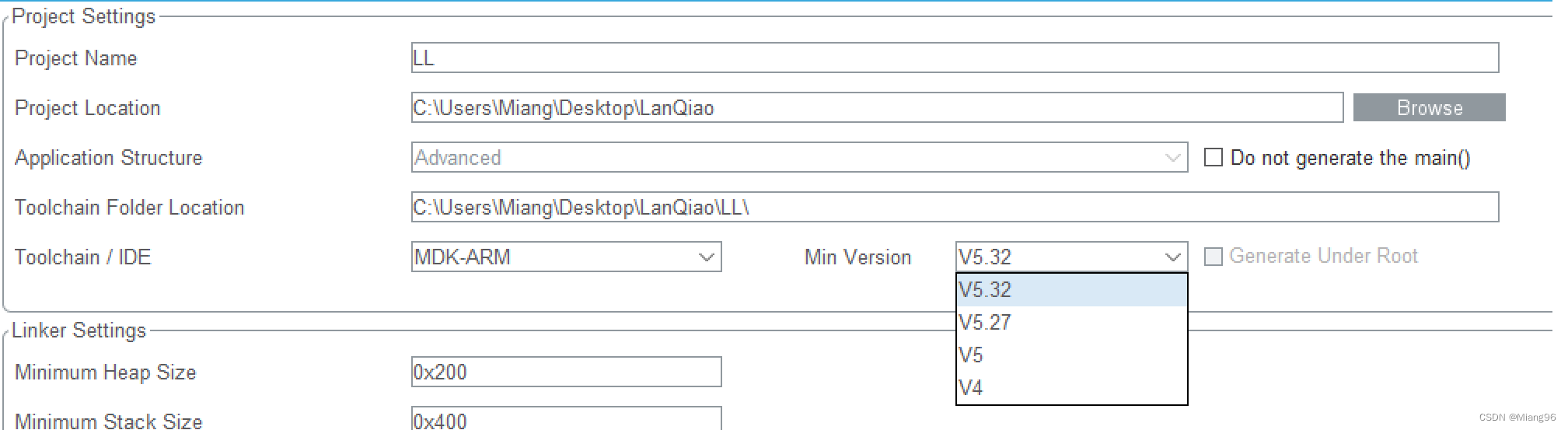
图4 CubeMX目前只支持生成AC5的Keil代码
安装AC5可参考这个博主的文章:KEIL MDK5.37版本自行添加AC5(ARMCC)编译器
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)